
In 2016, a positive decision by the FAA (Federal Aviation Administration) allowed drones to fly over cities. It gave a powerful impetus to the development of this segment. As known, decision removed all restrictions for drones weighing up to 250 grams. But models from four to five pounds cannot descend below twenty feet above people.
In addition, fierce competition between companies has significantly reduced the price of drones. As a result, multicopters turned from an expensive hobby into great and affordable entertainment. For example, FPV drones with FPV camera opened up the opportunity to realize dreams of flying in the sky.
Moreover, the possibility of using them for shooting, area reconnaissance, search, guard, delivery, etc opens up great prospects for the further integration of drones into all spheres of life. As a result, quadcopters quickly become one of the fastest growing segments of consumer electronics.
But the modern multicopter is very technically complex and has a lot of specs that directly affect its capabilities and price. Therefore, quadcopter choice requires knowledge of its basic specs.
Of course, the motor is one of its main components. Modern UAVs use Brushed DC motors or BLDC (Brushless Direct Current Motor) motors. BLDC motor is also sometimes called PMSM (Permanent Magnet Synchronous Motor).
BLDC (Brushless Direct Current) motor
Simplistically, a BLDC (Brushless Direct Current) motor or PMSM (Permanent Magnet Synchronous Motor) can be positioned as the next generation of a simpler brushed motor by using contactless permanent magnets instead of a brush-collector.
As usual, each of them has pros and cons. In particular, the performance gain and lifetime lengthening in BLDCs is partially offset by their higher price and additional ESC (electronic speed control) module. But in recent years, manufacturers have radically expanded their range with budget brushless motors. As a result, the cost of budget models today is very close to the price of traditional brush motors. Given this trend, budget BLDC has better prospects.
But the situation is different in the premium segment. The price of such BLDC motors remains significantly higher. Possibly, the difference is justified when used in rather expensive devices, including scooters, drones, premium or racing quadcopters, window lifters or air conditioners in cars, etc. But high-quality, expensive BLDC motors are hardly appropriate in a children’s drone or in a quadcopter for the first training flights.
The motor type is easily identified by the number of wires. In particular, brushed DC motors only use two wires (ground and phase). BLDC has a third wire to connect to the electronic speed control (ESC) module.

Brushed motor operation principle
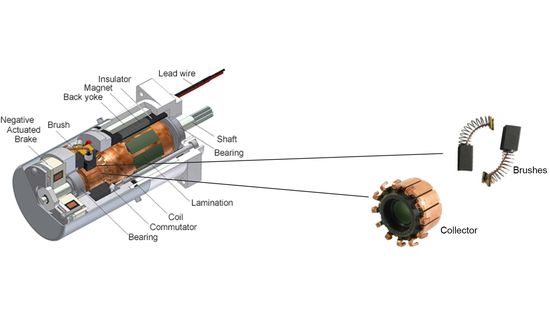
Any brushed motor has a double-magnet stator that surrounds a rotating rotor (or armature). The two poles of the current source create a magnetic field torque, which causes the rotor to rotate around its axis. The commutator, which includes a collector (set of contacts) and brushes, switches the polarity of the electric current after each rotation of the rotor by 180°. The changeover provides continuous rotor rotation due to one-way torque.
Pros
– lower price;
– easy to repair;
– higher resistance.
The simpler design provides more reliable performance in the most extreme environments;
– simple control.
Brushed two-wire motors use very simple control schemes.
Cons
– lower thrust and, consequently, less drone lift;
– short lifetime of the brushes.
Due to friction, the brushes require regular cleaning and periodic replacement;
– friction at high speed can be accompanied by motor overheating and sparking;
– commutator and brushes increase the size and weight of the motor;
– the commutator operation is accompanied by constant mechanical noise.
BLDC (Brushless Direct Current) motor operation principle
BLDC is also sometimes called PMSM (Permanent Magnet Synchronous Motor). A brushless servo motor uses two or more permanent magnets on a rotor that rotates around a stationary stator. A special circuit controls the current supply to the stator. Simplified, an electronic sensor detects the rotation speed and the rotation angle of the rotor. By controlling the transistors, the electronic speed control (ESC) module changes the direction of the electric current, creating a torque in one direction. In this scheme, the rotational speeds of the rotors and stators are the same.
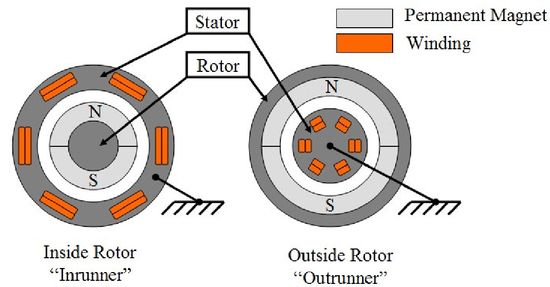
In addition, BLDC motors are classified into inrunner (a permanent magnet rotor rotates inside a stator with winding) and outrunner (as a rotor, the body rotates around the stator with winding).
Pros
– higher performance.
Using in a BLDC electronic control instead of a commutator with brushes has significantly increased the efficiency of converting electricity into mechanical energy. Experts estimate the difference in efficiency in the range of 5-15%. On average, their energy efficiency reaches 90% vs 70% compared to traditional brush motors;
– low maintenance due to lack of overheating, electrical noise, sparking, the need to replace brushes, etc;
– compact size due to the lack of a commutator;
– position sensors provide high accuracy and stability of rotation speed.
Cons
– significantly higher price;
– expensive and complicated repairs;
– additional electronic speed control (ESC) module increases weight and power consumption;
– more sensitive to vibrations, dust, and other contaminants.
KV

KV characterizes the engine power or its torque level and corresponds to a motor rpm constant at 1V with no load. Accordingly, 12V will provide 12,000 rpm for a 1000KV motor.
KV directly depends on magnets strength and inversely depends on the number of winds on the armature. For example, a low KV motor uses more winds, but of thinner wire. Accordingly, it transfers more volts at less amps.
The high KV motor uses less winds, but of thicker wire. Accordingly, it transfers more amps at less volts and can to spin a prop at high revs.
Of course, the load from the propeller reduces the rpm that is due to its operation principle. The motor is constantly changing polarity at high frequency. As the load increases, the frequency increases. As a result, the rotor does not have time to overcome the path between adjacent variable magnets and begins to be attracted by the previous one. It’s like wheel slip on ice. An increase in the rotation speed and car weigh increases the slip, reducing the useful thrust. Therefore, an accurate calculation of the actual thrust with load is not possible. In fact, KV figure is useful only at comparing engines to select the optimal motor depending on its purpose.
For example, an FPV racing quad requires high rpm for high speed. Therefore, a high KV motor and a small-diameter prop will be the optimal choice for it. Dron with professional heavy camera requires high torque with big-diameter prop and lower KV motor. For example, 2300KV accelerates the racing drone to 100km / h. Usually their KV ranges from 2300-2600. But modern mid and large non-racing drones usually use motors with KV up to 1000 and fairly large propellers.
Marking and choice of motors, propellers and frame
First letter characterizes the motor quality. The “V” series corresponds to the use of the best materials with the highest precision in assembly. Typically, these motors are designed for racing drones and rotate much faster. “X” series corresponds to the middle level, “A” series is intended for the budget segment.
The first four digits characterize the diameter and thickness of the magnetic circuit. The last letter denotes the three-phase connection method (STAR or DELTA). Usually, a STAR connection provides smoother acceleration, but rarely reaches maximum power. DELTA picks up speed faster and delivers the declared power, but requires significantly higher starting current.
A2212/15T example
2212 – magnetic core with a diameter of 22mm and 12mm thickness;
15 – 15 winding turns;
A – budget motor;
Т or Δ – DELTA winding.
The lifting force of the quadcopter must be capable of lifting the quadrocopter with a payload. In addition, the thrust margin must compensate for the imperfection of the motors. Approximate calculation formula:
Required thrust of one motor = (drone weight x 2) / number of motors.
Thus, a quadrocopter weighing 1 kg requires 4 motors with a thrust of 500 grams each.
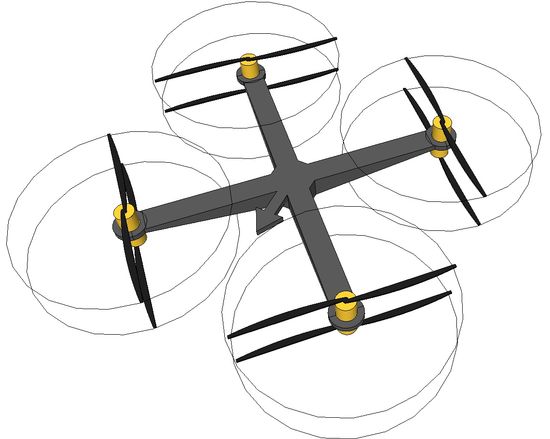
The choice of frame size and shape depends on the number of motors and the required propeller spacing. But the trajectories of their rotation should not overlap in order to avoid collisions with each other.
Of course, lightweight, durable composite frames (like a carbon frame) are ideal. But they are expensive. Cheap plastic frames are very unreliable for any threaded connection.
The propeller size directly affects the drone aerodynamics. Increasing the diagonal provides increased lift and stability, but impairs maneuverability.
Conclusion
Today both types of quadcopter motors compete quite successfully. The traditional brushed DC motors are ideal for entry-level training models and children’s drones. The more powerful brushless BLDC dominates the premium segment and racing drones. The choice of motors for mid-budget models depends on the budget and scope.
In addition, the Internet offers step-by-step instructions for replacing engines yourself. Of course, such a solution expands consumer choice, opening up the prospect of replacing them with brushless BLDCs. This decision is quite reasonable for the first stage of immersion in the world of flying. But, of course, such an upgrade requires assembly skills.
This video demonstrates the operation principle of brushless DC motor.
Pingback: How to choose the best quadcopter Review - The Appliances Reviews
Pingback: FPV drone Review - The Appliances Reviews
Pingback: Drone antenna Review - The Appliances Reviews
Pingback: DJI Mavic 2 Pro quadcopter Review - The Appliances Reviews
Pingback: Drone camera Review - The Appliances Reviews
Pingback: The smallest DJI Mavic Mini drone Review - The Appliances Reviews
Pingback: Drone intelligent flight modes - The Appliances Reviews
Pingback: Holy Stone drones Review - The Appliances Reviews
Pingback: FPV drone goggles Review - The Appliances Reviews
Pingback: Mid-tier mini drones Review - The Appliances Reviews
Pingback: New DJI digital FPV system Review - The Appliances Reviews